| |
| CCD Camera 위치보정 채용 |
| 로봇 |
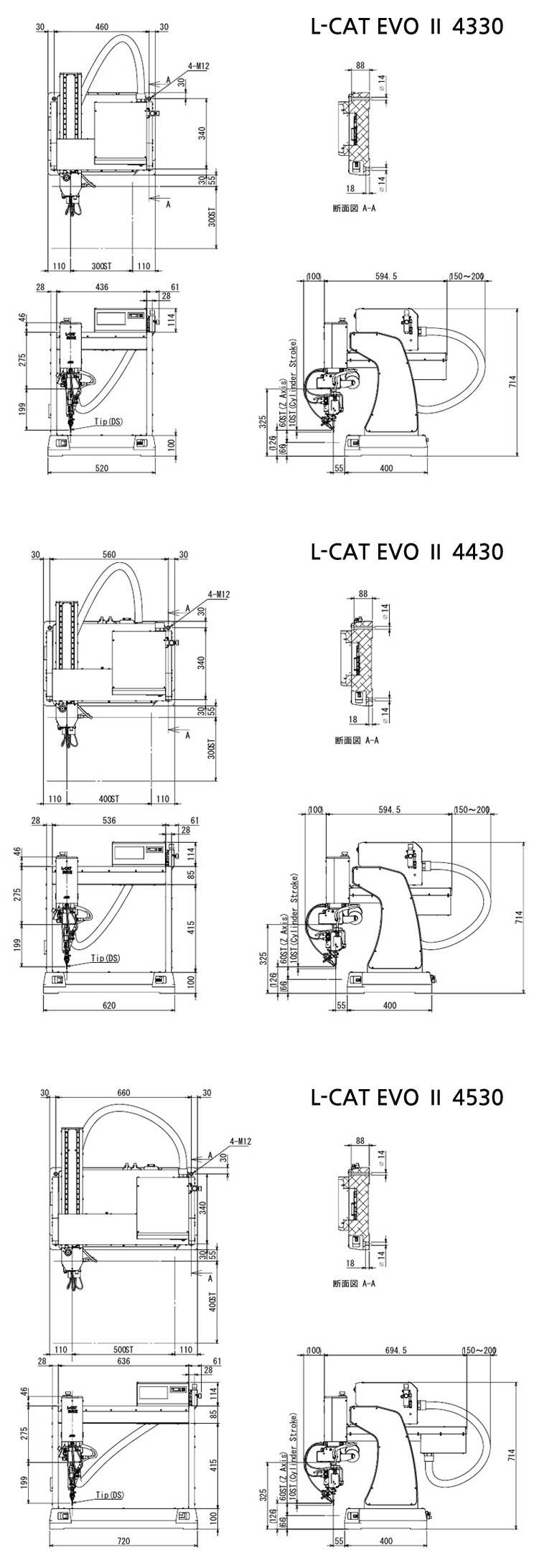
L-CAT EVO-II 4430 |
| 내용 |
CCD 카메라로 납땜 전 위치를 확인, 이 데이타로 납땜 좌표를 조정하고 납땜 진행 |
| 특, 장점 |
위치보정 후 정확한 위치에 납땜 가능. |
|

|
| Desktop Vision 검사채용 |
| 로봇 |
L-CAT EVO-II 4430 |
| 내용 |
알루미늄 base를 설치하여 desktop으로 사용, "Keyence" CV700으로 납땜결과를 화상처리한 후 그결과를 8인치 TFT touch panel 상에서 양부 판정 표시. |
| 특, 장점 |
납땜불량 검출 및 품질개선에 효과적. |
|

|
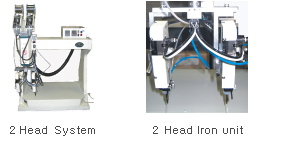
| 2헤드 Iron unit |
| 로봇 |
L-CAT EVO-II 4430 |
| 내용 |
2 Head로 동시에 2개소의 납땜을 실시. |
| 특, 장점 |
택트 타임이 개선되므로 대랑 생산품에 적합 |
|
|
| Desktop Twin Stage 시스템 |
| 로봇 |
L-CAT EVO-II 4430 |
| 내용 |
알루미늄 base를 설치하여 desktop으로 사용, soldering stage와 jig를 2개 확보하여 납땜 가능. |
| 특, 장점 |
택트 타임의 개선으로 생산품성 증가. |
|

|
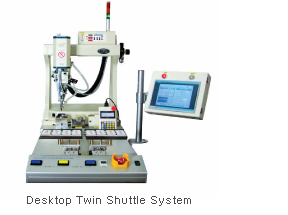
| Desktop Twin Shuttle 시스템 |
| 로봇 |
L-CAT EVO-II 4430 |
| 내용 |
Twin shuttle 위의 JIG에 교대로 work를 세팅한다, 한쪽 납땜중에 다른 쪽 work의 교체가 가능. |
| 특, 장점 |
고능률의 자동 납땜이 가능. |
|
|
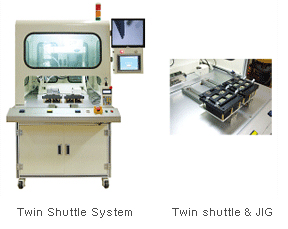
| Twin Shuttle 시스템 |
| 로봇 |
L-CAT EVO-II 4430 |
| 내용 |
Twin shuttle 위의 JIG에 work를 세팅한다, 한쪽 납땜중에 다른 쪽 work의 교체가 가능. |
| 특, 장점 |
지그 및 제품의 교체시간을 낭비하지 않고 고능률의 자동 납땜이 가능. |
| 터치패널 |
8.4" |
| CCD Camera |
50배율 고화상 Camera 탑재 |
| Program |
스테이션 A,B각 50Program(합계 100) |
| 이송방식 |
Twin LM Cylinder 이송 |
|
|
| In Line 시스템 |
| 로봇 |
L-CAT EVO-II 4430 |
| 내용 |
4대의 로봇을 in line으로 사용 전면의 touch panel로 조작 |
| 특, 장점 |
전공정, 후공정의 line과 연결하여 사용할 수 있으므로 대폭적인 능률 개선이 가능. |
|

|
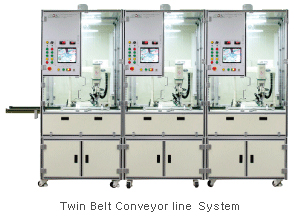
| Twin Belt Conveyor line 시스템 |
| 로봇 |
L-CAT EVO-II 4430 |
| 내용 |
Belt Conveyor와 3대의 로봇을 연결하여 조작 panel로 시스템 제어. |
| 특, 장점 |
여러대의 로봇을 연결하여 생산량을 증대하여 능률 개선. |
|
|
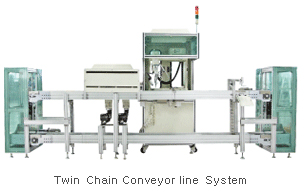
| Twin Chain Conveyor line 시스템 |
| 로봇 |
L-CAT EVO-II 4430 |
| 내용 |
Conveyor와 3대의 로봇을 탑재하여 touch panel 조작으로 순환식 납때. |
| 특, 장점 |
Pre-heating을 통하여 택트 타임을 단축시켜 생산량 증대. |
|
|
|